介绍 通常,对光学系统进行优化以创建清晰图像时,它们的性能最佳。例如,微距镜头经过优化可提供附近物体的清晰图像,而变焦镜头经过优化,可以在一定的物距范围内成像。在每种情况下,清晰的图像都是目标。但是,并非所有光学系统都使用图像质量来衡量性能。诸如光谱仪或太阳能聚光器之类的许多系统都具有设计必须满足的辐照度要求。对于这样的系统,封闭式能量优化是对性能要求的更好描述。在本文中,我们描述了一个示例系统,其中封闭式能量优化对于最终系统的性能至关重要。我们用CODEV光学设计软件显示了这类建模的分析和优化的结果。
激光雷达:自动驾驶技术
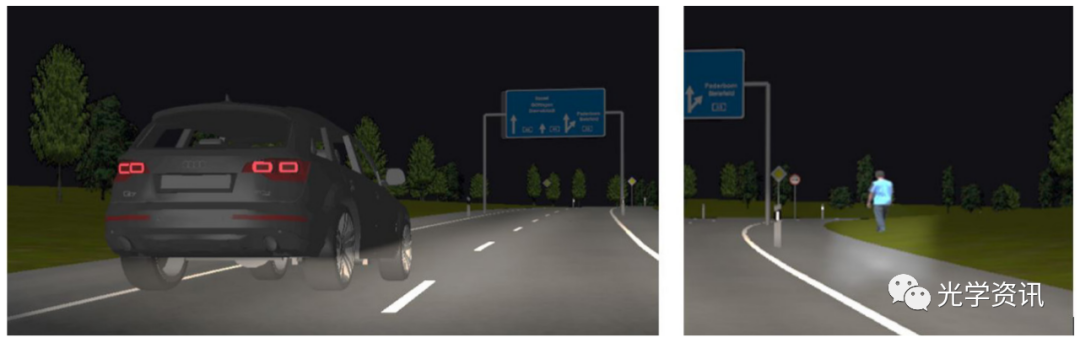
激光雷达(光检测和测距)是一种光学技术,通常被称为自动驾驶汽车距离感测的关键方法。 在激光雷达中,激光从光源发出并从场景中的对象反射。 检测到反射光,然后使用飞行时间(TOF)绘制场景中物体的距离图。许多制造商正在努力开发经济高效的紧凑型激光雷达系统。 几乎所有追求自动驾驶的生产商都将激光雷达视为一项关键的使能技术,并且一些激光雷达系统已经可用于高级驾驶员辅助系统(ADAS)。
图1:激光雷达感应可以支持驾驶员(和行人)安全的示例驾驶情况
不同的光学系统-不同的性能要求
与照相镜头不同的是,诸如调制传递函数(MTF)之类的成像指标指导设计者,激光雷达系统受不同性能要求的驱动。对于激光雷达系统,如果从视野中不同点返回到检测器的能量不一致,则TOF保真度和场景分辨率将丢失。因此,在整个视野范围内优化收集的能量至关重要。
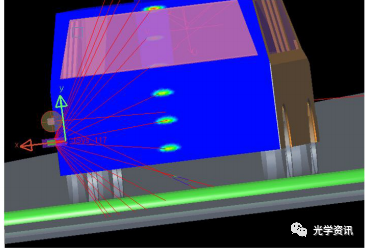
图2:一维扫描激光雷达系统中具有代表性的激光斑仿真车辆
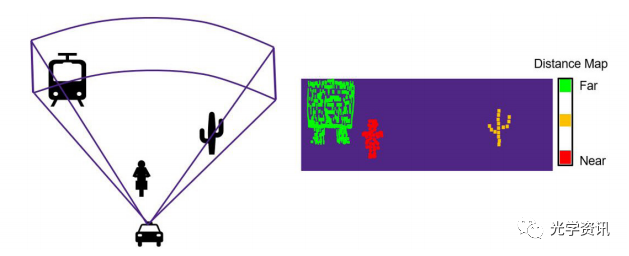
图3:图3:3D 闪光激光雷达(紫色信封)及代表距离图(TOF mapping) 对于50米以下的短距离,3D闪光激光雷达(向外发出的激光脉冲照亮系统的整个视场或FOV)通常效果最佳。对于这些系统,具有均匀能量收集的水平FOV很重要。在下面的示例中,我们考虑这样的闪存系统。目的是在整个FOV的给定检测器区域中获得均匀的封闭能量,以确保在整个传感器可视区域内物体的深度信息。
激光雷达接收器设计注意事项
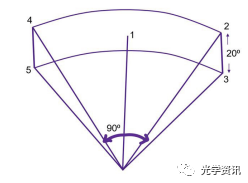
我们的设计示例是前瞻性的短距离激光雷达。视距和FOV要求分别为30米和90°水平FOV 以及20°垂直FOV。
图4:短距离
激光雷达接收器设计的水平和垂直FOV草图 均匀封闭能量的优化:使用CODE V中的封闭能量函数的简单过程
对于激光雷达示例系统的接收器光学器件,我们从过期的专利透镜开始,该透镜具有四个覆盖45°半FOV的元件。CODE V具有镜头的大型资料库,可实现高效的设计。优化的目的是提高模拟探测器元件的能量均匀性。对于检测器元件,我们假设矩形宽高比阵列覆盖90°x 20°FOV。我们假设一个1376 x 768的垂直雪崩光电二极管(VAPD)阵列代表了当前开发的技术,其有效面积约为16.0 mm x 9.0 mm。
根据数据,选择8.0 mm的焦距以覆盖90°水平FOV。
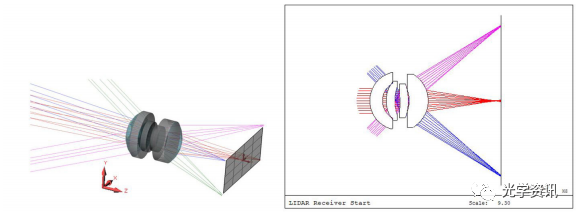
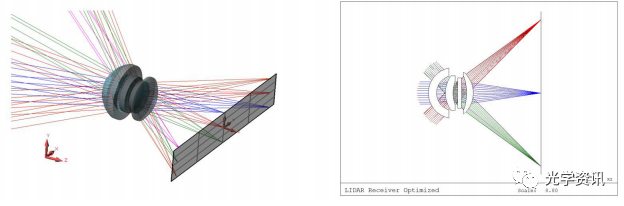
图5:用于在宽水平视场上收集能量的起始光学系统
激光雷达接收器系统的初始性能
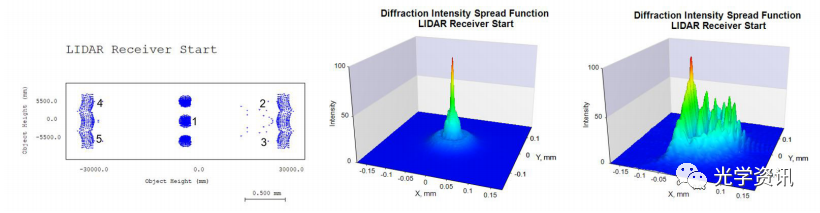
为了了解初始设计性能,我们检查了每个视场的点图。在下图中,在检测器平面上的每个视场绘制了100 µm x 100 µm的框,以及相应的聚焦点(代表能量的几何分布)。这些对应于从该区域的中心和四个角射出的光的观察。
图6:上一个草图中显示的编号场点的起点点图(左侧标度为500 µm),以及中心和一个边缘场点的3D PSF图(注意不对称) 如图所示,透镜在接收器平面处具有实质的像差和不对称的能量分布。 接下来,我们将优化均匀的封闭能量并显示最终的系统性能。
CODE V封闭式能量Macro-PLUS功能的描述CODE V光学设计软件中提供的一组新工具非常适合帮助光学工程师在封闭式能量对于分析或优化最重要的系统上工作。这些工具作为CODE V中的Macro-PLUS™功能提供,可帮助设计人员分析和优化特定尺寸或封闭在特定直径的探测器上的能量。
为了使用这些功能评估封闭的能量,设计人员提供了有关目标封闭能量的几何形状,计算能量的方法(固定在质心上或在X,Y或两个方向上扫描)以及采样的信息。CODE V可以灵活地对许多分析选项的输出进行封闭式能量评估。这些选项包括点扩展功能(PSF),光束传播(BSP)和照明分析(LUM)等选项。此外,PSF数据可用于优化,如以下示例所示。
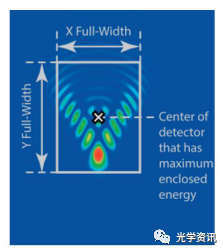
图7:尺寸为X全宽Y全宽的矩形检测器上封闭的能量示例
图8:FOV的起始能量分布
能量的初始分布显示,给定单个APD检测器尺寸(大约15 µm x 15 µm),光的扩散将超过我们所需面积的十倍。来自单个观察斑块(对象分辨率元素)的大部分光将散布在接收器平面的几个像素上。这对于FOV中的离轴点尤其如此,这会阻止精确的深度映射。
统一接收器能量的优化
为了解决能量分布的不均匀性,我们接下来在CODE V中优化封闭式能量。我们通过使用新的封闭式能量函数,如上所述在CODE V Macro-PLUS™编程语言中创建封闭式能量约束,实现了这一目标。我们为每个场点设定了75%能量的目标,该目标包含在直径15 µm的圆内。优化可以非常快速地实现(仅需要一分钟以上的计算时间)。注意,封闭的能量几何形状不需要最小化。可以针对任意大小的分布,这取决于应用程序。
图9:最终优化的激光雷达接收器光学系统
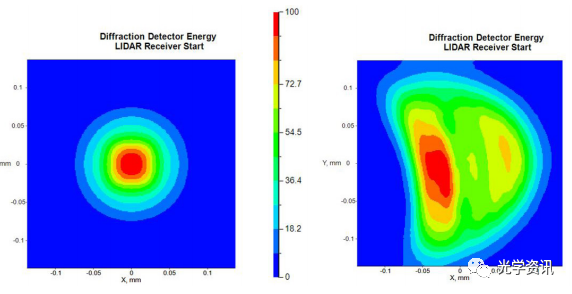
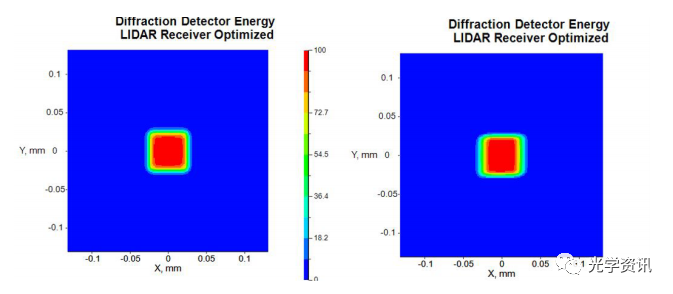
图10:封闭能量约束在优化之前(左)和优化后(右)的能量分布图
图11:能量分布、观察区域中心(左)、FOV左上角、200个mr m x 200个mr m区域、检查50个mr m x 50个mr m探测器单元(对应物空间中的145 mm x 145 mm patch)
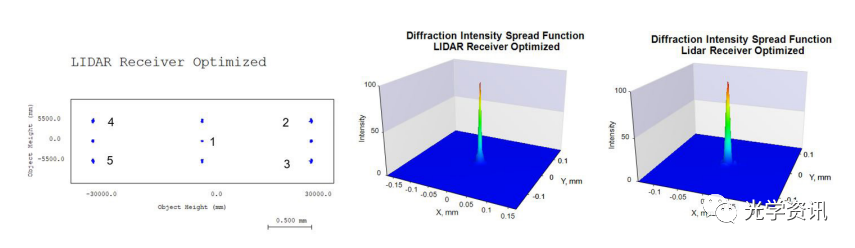
图12:上一个草图中显示的编号场点的优化后斑点图(左侧的比例再次为500 µm),以及中心和一个边缘场点的3D PSF图(注意不对称)
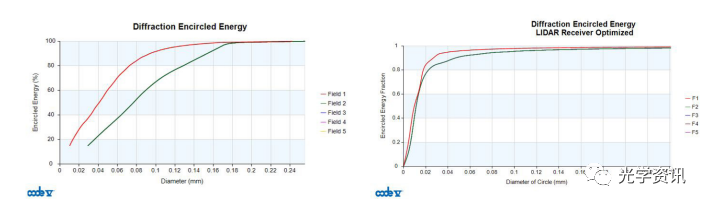
从这些分析中,我们看到最终系统的绕圆衍射能量图现在已经达到我们在15 µm圆中实现75%能量的设计目标。我们看到物体空间中的145 mm x 145 mm正方形斑块映射到APD阵列(激光雷达接收器)平面上更均匀的对应能量区域,点图和3D PSF在整个视场中显示了系统的均匀性。设计的系统是激光雷达系统的深度测量的理想选择。
总结 光学工程师可以使用一组新的CODE V Macro-PLUS功能,可以轻松分析和优化各种几何形状的封闭能量。这些功能对于设计系统非常有用,在这些系统中,封闭的能量是设计要求的重要组成部分(或者实际上可能是关键定义)。我们讨论了一个示例性的激光雷达接收器系统,并给出了针对给定目标斑块尺寸和分辨率对探测器阵列平面上的均匀封闭能量进行优化的结果。许多光学系统将从这种灵活,高效的设计能力中受益。 |

官方公众号

官方客服







![[VirtualLab] 二维叉形光栅产生涡旋光阵列](https://img.optkt.com/dataattach/block/c1/c1250fdddd5aa4d5edc5364120ef1954.jpg)
![[VirtualLab] 产生长焦深Bessel光束的HOE设计](https://img.optkt.com/dataattach/block/21/2199c88436522455cbfda04f86ce32e3.jpg)
![[VirtualLab] 二维叉形光栅产生涡旋光阵列](https://img.optkt.com/dataattach/block/61/61dae81938b04bf9aedf63454a94208c.jpg)

